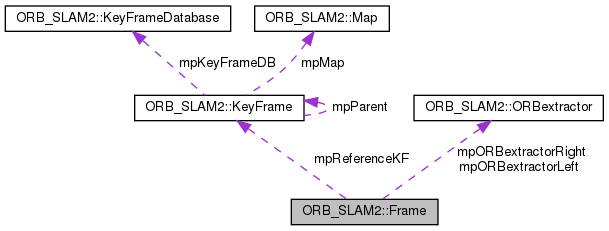
Collaboration diagram for ORB_SLAM2::Frame:
Public Member Functions | |
| Frame (const Frame &frame) | |
| Frame (const cv::Mat &imLeft, const cv::Mat &imRight, const double &timeStamp, ORBextractor *extractorLeft, ORBextractor *extractorRight, ORBVocabulary *voc, cv::Mat &K, cv::Mat &distCoef, const float &bf, const float &thDepth) | |
| Frame (const cv::Mat &imGray, const cv::Mat &imDepth, const double &timeStamp, ORBextractor *extractor, ORBVocabulary *voc, cv::Mat &K, cv::Mat &distCoef, const float &bf, const float &thDepth) | |
| Frame (const cv::Mat &imGray, const double &timeStamp, ORBextractor *extractor, ORBVocabulary *voc, cv::Mat &K, cv::Mat &distCoef, const float &bf, const float &thDepth) | |
| void | ExtractORB (int flag, const cv::Mat &im) |
| void | ComputeBoW () |
| void | SetPose (cv::Mat Tcw) |
| void | UpdatePoseMatrices () |
| cv::Mat | GetCameraCenter () |
| cv::Mat | GetRotationInverse () |
| bool | isInFrustum (MapPoint *pMP, float viewingCosLimit) |
| bool | PosInGrid (const cv::KeyPoint &kp, int &posX, int &posY) |
| vector< size_t > | GetFeaturesInArea (const float &x, const float &y, const float &r, const int minLevel=-1, const int maxLevel=-1) const |
| void | ComputeStereoMatches () |
| void | ComputeStereoFromRGBD (const cv::Mat &imDepth) |
| cv::Mat | UnprojectStereo (const int &i) |
Public Attributes | |
| ORBVocabulary * | mpORBvocabulary |
| ORBextractor * | mpORBextractorLeft |
| ORBextractor * | mpORBextractorRight |
| double | mTimeStamp |
| cv::Mat | mK |
| cv::Mat | mDistCoef |
| float | mbf |
| float | mb |
| float | mThDepth |
| int | N |
| std::vector< cv::KeyPoint > | mvKeys |
| std::vector< cv::KeyPoint > | mvKeysRight |
| std::vector< cv::KeyPoint > | mvKeysUn |
| std::vector< float > | mvuRight |
| std::vector< float > | mvDepth |
| DBoW2::BowVector | mBowVec |
| DBoW2::FeatureVector | mFeatVec |
| cv::Mat | mDescriptors |
| cv::Mat | mDescriptorsRight |
| std::vector< MapPoint * > | mvpMapPoints |
| std::vector< bool > | mvbOutlier |
| std::vector< std::size_t > | mGrid [FRAME_GRID_COLS][FRAME_GRID_ROWS] |
| cv::Mat | mTcw |
| long unsigned int | mnId |
| KeyFrame * | mpReferenceKF |
| int | mnScaleLevels |
| float | mfScaleFactor |
| float | mfLogScaleFactor |
| vector< float > | mvScaleFactors |
| vector< float > | mvInvScaleFactors |
| vector< float > | mvLevelSigma2 |
| vector< float > | mvInvLevelSigma2 |
The documentation for this class was generated from the following files:
- /home/yubao/data/catkin_ws/src/ORB_SLAM2/include/Frame.h
- /home/yubao/data/catkin_ws/src/ORB_SLAM2/src/Frame.cpp
