|
|
| KeyFrame (Frame &F, Map *pMap, KeyFrameDatabase *pKFDB) |
| |
|
void | SetPose (const cv::Mat &Tcw) |
| |
|
cv::Mat | GetPose () |
| |
|
cv::Mat | GetPoseInverse () |
| |
|
cv::Mat | GetCameraCenter () |
| |
|
cv::Mat | GetStereoCenter () |
| |
|
cv::Mat | GetRotation () |
| |
|
cv::Mat | GetTranslation () |
| |
|
void | ComputeBoW () |
| |
|
void | AddConnection (KeyFrame *pKF, const int &weight) |
| |
|
void | EraseConnection (KeyFrame *pKF) |
| |
|
void | UpdateConnections () |
| |
|
void | UpdateBestCovisibles () |
| |
|
std::set< KeyFrame * > | GetConnectedKeyFrames () |
| |
|
std::vector< KeyFrame *> | GetVectorCovisibleKeyFrames () |
| |
|
std::vector< KeyFrame * > | GetBestCovisibilityKeyFrames (const int &N) |
| |
|
std::vector< KeyFrame * > | GetCovisiblesByWeight (const int &w) |
| |
|
int | GetWeight (KeyFrame *pKF) |
| |
|
void | AddChild (KeyFrame *pKF) |
| |
|
void | EraseChild (KeyFrame *pKF) |
| |
|
void | ChangeParent (KeyFrame *pKF) |
| |
|
std::set< KeyFrame * > | GetChilds () |
| |
|
KeyFrame * | GetParent () |
| |
|
bool | hasChild (KeyFrame *pKF) |
| |
|
void | AddLoopEdge (KeyFrame *pKF) |
| |
|
std::set< KeyFrame * > | GetLoopEdges () |
| |
|
void | AddMapPoint (MapPoint *pMP, const size_t &idx) |
| |
|
void | EraseMapPointMatch (const size_t &idx) |
| |
|
void | EraseMapPointMatch (MapPoint *pMP) |
| |
|
void | ReplaceMapPointMatch (const size_t &idx, MapPoint *pMP) |
| |
|
std::set< MapPoint * > | GetMapPoints () |
| |
|
std::vector< MapPoint * > | GetMapPointMatches () |
| |
|
int | TrackedMapPoints (const int &minObs) |
| |
|
MapPoint * | GetMapPoint (const size_t &idx) |
| |
|
std::vector< size_t > | GetFeaturesInArea (const float &x, const float &y, const float &r) const |
| |
|
cv::Mat | UnprojectStereo (int i) |
| |
|
bool | IsInImage (const float &x, const float &y) const |
| |
|
void | SetNotErase () |
| |
|
void | SetErase () |
| |
|
void | SetBadFlag () |
| |
|
bool | isBad () |
| |
|
float | ComputeSceneMedianDepth (const int q) |
| |
|
|
static bool | weightComp (int a, int b) |
| |
|
static bool | lId (KeyFrame *pKF1, KeyFrame *pKF2) |
| |
|
|
long unsigned int | mnId |
| |
|
const long unsigned int | mnFrameId |
| |
|
const double | mTimeStamp |
| |
|
const int | mnGridCols |
| |
|
const int | mnGridRows |
| |
|
const float | mfGridElementWidthInv |
| |
|
const float | mfGridElementHeightInv |
| |
|
long unsigned int | mnTrackReferenceForFrame |
| |
|
long unsigned int | mnFuseTargetForKF |
| |
|
long unsigned int | mnBALocalForKF |
| |
|
long unsigned int | mnBAFixedForKF |
| |
|
long unsigned int | mnLoopQuery |
| |
|
int | mnLoopWords |
| |
|
float | mLoopScore |
| |
|
long unsigned int | mnRelocQuery |
| |
|
int | mnRelocWords |
| |
|
float | mRelocScore |
| |
|
cv::Mat | mTcwGBA |
| |
|
cv::Mat | mTcwBefGBA |
| |
|
long unsigned int | mnBAGlobalForKF |
| |
|
const float | fx |
| |
|
const float | fy |
| |
|
const float | cx |
| |
|
const float | cy |
| |
|
const float | invfx |
| |
|
const float | invfy |
| |
|
const float | mbf |
| |
|
const float | mb |
| |
|
const float | mThDepth |
| |
|
const int | N |
| |
|
const std::vector< cv::KeyPoint > | mvKeys |
| |
|
const std::vector< cv::KeyPoint > | mvKeysUn |
| |
|
const std::vector< float > | mvuRight |
| |
|
const std::vector< float > | mvDepth |
| |
|
const cv::Mat | mDescriptors |
| |
|
DBoW2::BowVector | mBowVec |
| |
|
DBoW2::FeatureVector | mFeatVec |
| |
|
cv::Mat | mTcp |
| |
|
const int | mnScaleLevels |
| |
|
const float | mfScaleFactor |
| |
|
const float | mfLogScaleFactor |
| |
|
const std::vector< float > | mvScaleFactors |
| |
|
const std::vector< float > | mvLevelSigma2 |
| |
|
const std::vector< float > | mvInvLevelSigma2 |
| |
|
const int | mnMinX |
| |
|
const int | mnMinY |
| |
|
const int | mnMaxX |
| |
|
const int | mnMaxY |
| |
|
const cv::Mat | mK |
| |
|
|
static long unsigned int | nNextId =0 |
| |
|
|
cv::Mat | Tcw |
| |
|
cv::Mat | Twc |
| |
|
cv::Mat | Ow |
| |
|
cv::Mat | Cw |
| |
|
std::vector< MapPoint * > | mvpMapPoints |
| |
|
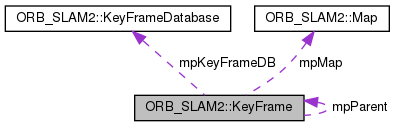
KeyFrameDatabase * | mpKeyFrameDB |
| |
|
ORBVocabulary * | mpORBvocabulary |
| |
|
std::vector< std::vector< std::vector< size_t > > > | mGrid |
| |
|
std::map< KeyFrame *, int > | mConnectedKeyFrameWeights |
| |
|
std::vector< KeyFrame * > | mvpOrderedConnectedKeyFrames |
| |
|
std::vector< int > | mvOrderedWeights |
| |
|
bool | mbFirstConnection |
| |
|
KeyFrame * | mpParent |
| |
|
std::set< KeyFrame * > | mspChildrens |
| |
|
std::set< KeyFrame * > | mspLoopEdges |
| |
|
bool | mbNotErase |
| |
|
bool | mbToBeErased |
| |
|
bool | mbBad |
| |
|
float | mHalfBaseline |
| |
|
Map * | mpMap |
| |
|
std::mutex | mMutexPose |
| |
|
std::mutex | mMutexConnections |
| |
|
std::mutex | mMutexFeatures |
| |
The documentation for this class was generated from the following files:
- /home/yubao/data/catkin_ws/src/ORB_SLAM2/include/KeyFrame.h
- /home/yubao/data/catkin_ws/src/ORB_SLAM2/src/KeyFrame.cpp