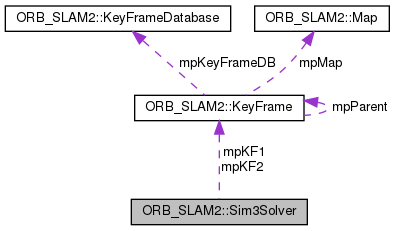
Collaboration diagram for ORB_SLAM2::Sim3Solver:
Public Member Functions | |
| Sim3Solver (KeyFrame *pKF1, KeyFrame *pKF2, const std::vector< MapPoint *> &vpMatched12, const bool bFixScale=true) | |
| void | SetRansacParameters (double probability=0.99, int minInliers=6, int maxIterations=300) |
| cv::Mat | find (std::vector< bool > &vbInliers12, int &nInliers) |
| cv::Mat | iterate (int nIterations, bool &bNoMore, std::vector< bool > &vbInliers, int &nInliers) |
| cv::Mat | GetEstimatedRotation () |
| cv::Mat | GetEstimatedTranslation () |
| float | GetEstimatedScale () |
Protected Attributes | |
| KeyFrame * | mpKF1 |
| KeyFrame * | mpKF2 |
| std::vector< cv::Mat > | mvX3Dc1 |
| std::vector< cv::Mat > | mvX3Dc2 |
| std::vector< MapPoint * > | mvpMapPoints1 |
| std::vector< MapPoint * > | mvpMapPoints2 |
| std::vector< MapPoint * > | mvpMatches12 |
| std::vector< size_t > | mvnIndices1 |
| std::vector< size_t > | mvSigmaSquare1 |
| std::vector< size_t > | mvSigmaSquare2 |
| std::vector< size_t > | mvnMaxError1 |
| std::vector< size_t > | mvnMaxError2 |
| int | N |
| int | mN1 |
| cv::Mat | mR12i |
| cv::Mat | mt12i |
| float | ms12i |
| cv::Mat | mT12i |
| cv::Mat | mT21i |
| std::vector< bool > | mvbInliersi |
| int | mnInliersi |
| int | mnIterations |
| std::vector< bool > | mvbBestInliers |
| int | mnBestInliers |
| cv::Mat | mBestT12 |
| cv::Mat | mBestRotation |
| cv::Mat | mBestTranslation |
| float | mBestScale |
| bool | mbFixScale |
| std::vector< size_t > | mvAllIndices |
| std::vector< cv::Mat > | mvP1im1 |
| std::vector< cv::Mat > | mvP2im2 |
| double | mRansacProb |
| int | mRansacMinInliers |
| int | mRansacMaxIts |
| float | mTh |
| float | mSigma2 |
| cv::Mat | mK1 |
| cv::Mat | mK2 |
The documentation for this class was generated from the following files:
- /home/yubao/data/catkin_ws/src/ORB_SLAM2/include/Sim3Solver.h
- /home/yubao/data/catkin_ws/src/ORB_SLAM2/src/Sim3Solver.cpp
