|
|
| LocalMapping (Map *pMap, const float bMonocular) |
| |
|
void | SetLoopCloser (LoopClosing *pLoopCloser) |
| |
|
void | SetTracker (Tracking *pTracker) |
| |
|
void | Run () |
| |
|
void | InsertKeyFrame (KeyFrame *pKF) |
| |
|
void | RequestStop () |
| |
|
void | RequestReset () |
| |
|
bool | Stop () |
| |
|
void | Release () |
| |
|
bool | isStopped () |
| |
|
bool | stopRequested () |
| |
|
bool | AcceptKeyFrames () |
| |
|
void | SetAcceptKeyFrames (bool flag) |
| |
|
bool | SetNotStop (bool flag) |
| |
|
void | InterruptBA () |
| |
|
void | RequestFinish () |
| |
|
bool | isFinished () |
| |
|
int | KeyframesInQueue () |
| |
|
|
bool | CheckNewKeyFrames () |
| |
|
void | ProcessNewKeyFrame () |
| |
|
void | CreateNewMapPoints () |
| |
|
void | MapPointCulling () |
| |
|
void | SearchInNeighbors () |
| |
|
void | KeyFrameCulling () |
| |
|
cv::Mat | ComputeF12 (KeyFrame *&pKF1, KeyFrame *&pKF2) |
| |
|
cv::Mat | SkewSymmetricMatrix (const cv::Mat &v) |
| |
|
void | ResetIfRequested () |
| |
|
bool | CheckFinish () |
| |
|
void | SetFinish () |
| |
|
|
bool | mbMonocular |
| |
|
bool | mbResetRequested |
| |
|
std::mutex | mMutexReset |
| |
|
bool | mbFinishRequested |
| |
|
bool | mbFinished |
| |
|
std::mutex | mMutexFinish |
| |
|
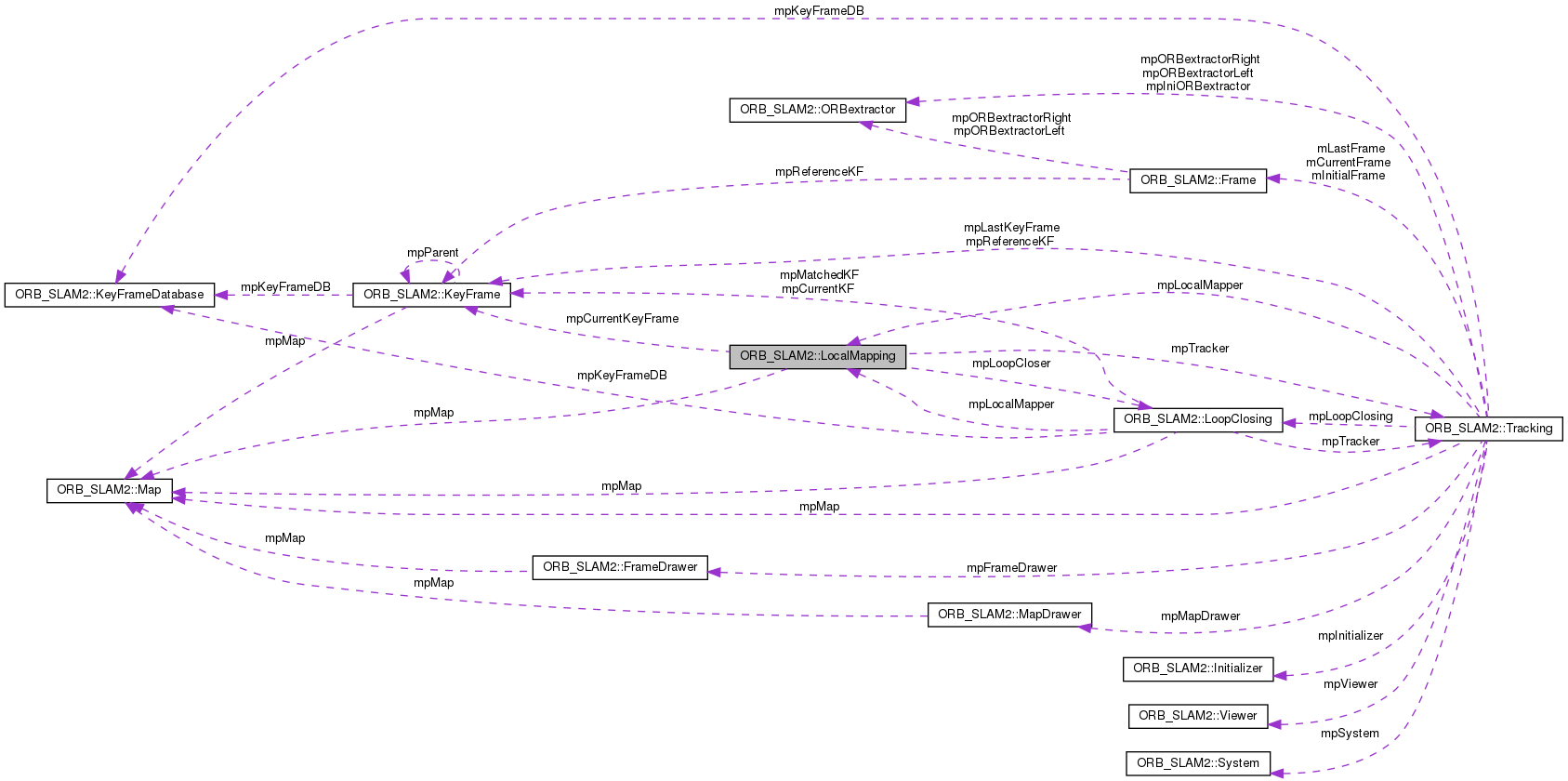
Map * | mpMap |
| |
|
LoopClosing * | mpLoopCloser |
| |
|
Tracking * | mpTracker |
| |
|
std::list< KeyFrame * > | mlNewKeyFrames |
| |
|
KeyFrame * | mpCurrentKeyFrame |
| |
|
std::list< MapPoint * > | mlpRecentAddedMapPoints |
| |
|
std::mutex | mMutexNewKFs |
| |
|
bool | mbAbortBA |
| |
|
bool | mbStopped |
| |
|
bool | mbStopRequested |
| |
|
bool | mbNotStop |
| |
|
std::mutex | mMutexStop |
| |
|
bool | mbAcceptKeyFrames |
| |
|
std::mutex | mMutexAccept |
| |
The documentation for this class was generated from the following files:
- /home/yubao/data/catkin_ws/src/ORB_SLAM2/include/LocalMapping.h
- /home/yubao/data/catkin_ws/src/ORB_SLAM2/src/LocalMapping.cpp